Concluding
Léon olde Scholtenhuis
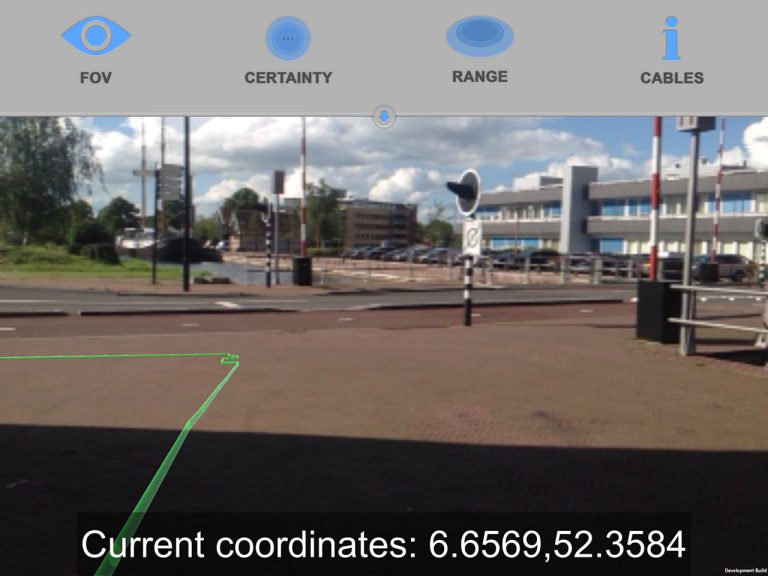
The project finished by March-17, 2017. The prototype was tested later on in Rotterdam (Oostplein and Hoogvliet) and Enschede (University of Twente Campus). With regard to Augmented Reality, the development was done successfully by our partner Recognize. The generation of 3D Fuzzy Shapes based on location data sets with various quality levels (unknown, surveyed, estimated, standard) took place based on our developed extension of the CityGML Utility Network ADE. We mapped existing shape files with FME (safesoft) and used FZKViewer for visualization.
The project resulted into a conference publication at the International Workshop for Computing in Civil Engineering, Seattle USA:
olde Scholtenhuis, L. L., Zlatanova, S., & den Duijn, X. (2017). 3D Approach for Representing Uncertainties of Underground Utility Data. In K-Y. Lin, N. El-Gohary, & P. Tang (Eds.), Computing in Civil Engineering 2017: Information Modeling and Data Analytics (Vol. 2017, pp. 369-376). Seattle, Washington: American Society of Civil Engineers (ASCE).
Furthermore, we showcased the example at various places. A short promotion video can be found on the "Actuele Projecten (Dutch) and Projects (English) pages": Link (English)and Link (Dutch).
We again gratefully acknowledge the support from 4TU.Bouw (sponsor), Municipality of Rotterdam and Recognize in executing this study.